Since the time Star Wars came out, I fell in love with the idea of astromech robots like R2D2. While George Lucas wanted robots in his film, Ralph McQuarrie envisioned how these droids would integrate with society.
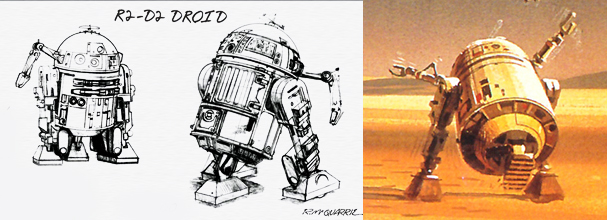
R2 does not talk and it is billed as a ‘utility droid’. So Ralph dreamed of this compact, tool-laiden, rolling swiss-knife robot. It’s primary language is for talking to other technology and not humans. After being interested in robots for almost 40 years and being an engineer for almost 30, I still find this concept valid. I think the robots of the future that will make our food, fix our stuff and clean our rooms will, in fact, evolve to be very much like R2-D2.
I was finally convinced that my time for building an astromech has come. I saw the R2 units at the the 2015 Maker Faire in San Mateo California. I had a great conversation with one of the booth presenters who encouraged me to check out Astromech.net, a meeting place for those who want to build their own R2 units. Astromech.net is a community of builders as well as a repository of plans for every part in R2’s system. In addition, a few of the community members are part of the Builder’s Council (BC) and they produce club approved small runs of parts that you can buy directly from them. While some builders have the ability to fabricate all the parts in the R2 system by themselves, having access to high quality components is a boon to the rest of us and allows builders to get their R2 systems running sooner than later.
My next step is to get a pre-fabricated dome shell. I researched doing this myself but it turns out that spherical aluminum shells are rather hard to find, plus cutting all the ‘pie-shapes’ out of the dome is probably left to professionals with the proper CNC equipment. So in June, for about $500, I ordered a dome from one of the approved BC members.